

|
|
|
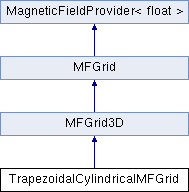
#include <TrapezoidalCylindricalMFGrid.h>
Public Member Functions | |
| void | dump () const |
| virtual LocalPoint | fromGridFrame (double a, double b, double c) const |
| find grid coordinates for point. For debugging and validation only. | |
| virtual void | toGridFrame (const LocalPoint &p, double &a, double &b, double &c) const |
| find grid coordinates for point. For debugging and validation only. | |
| TrapezoidalCylindricalMFGrid (binary_ifstream &istr, const GloballyPositioned< float > &vol) | |
| virtual LocalVector | uncheckedValueInTesla (const LocalPoint &p) const |
| Interpolated field value at given point; does not check for exceptions. | |
Private Attributes | |
| Trapezoid2RectangleMappingX | mapping_ |
Definition at line 9 of file TrapezoidalCylindricalMFGrid.h.
| TrapezoidalCylindricalMFGrid::TrapezoidalCylindricalMFGrid | ( | binary_ifstream & | istr, |
| const GloballyPositioned< float > & | vol | ||
| ) |
Definition at line 10 of file TrapezoidalCylindricalMFGrid.cc.
References a, abs, b, gather_cfg::cout, delta, MFGrid::frame(), MFGrid3D::grid_, h, i, j, mapping_, submitDQMOfflineCAF::nLines, Geom::pi(), Trapezoid2RectangleMappingX::rectangle(), and GloballyPositioned< T >::toLocal().
: MFGrid3D(vol) { // The parameters read from the data files are given in global coordinates. // In version 85l, local frame has the same orientation of global frame for the reference // volume, i.e. the r.f. transformation is only a translation. // There is therefore no need to convert the field values to local coordinates. // Check this assumption: GlobalVector localXDir(frame().toGlobal(LocalVector(1,0,0))); GlobalVector localYDir(frame().toGlobal(LocalVector(0,1,0))); if (localXDir.dot(GlobalVector(1,0,0)) > 0.999999 && localYDir.dot(GlobalVector(0,1,0)) > 0.999999) { // "null" rotation - requires no conversion... } else { cout << "ERROR: TrapezoidalCylindricalMFGrid: unexpected orientation: x: " << localXDir << " y: " << localYDir << endl; } int n1, n2, n3; inFile >> n1 >> n2 >> n3; double xref, yref, zref; inFile >> xref >> yref >> zref; double stepx, stepy, stepz; inFile >> stepx >> stepy >> stepz; double BasicDistance1[3][3]; // linear step double BasicDistance2[3][3]; // linear offset bool easya, easyb, easyc; inFile >> BasicDistance1[0][0] >> BasicDistance1[1][0] >> BasicDistance1[2][0]; inFile >> BasicDistance1[0][1] >> BasicDistance1[1][1] >> BasicDistance1[2][1]; inFile >> BasicDistance1[0][2] >> BasicDistance1[1][2] >> BasicDistance1[2][2]; inFile >> BasicDistance2[0][0] >> BasicDistance2[1][0] >> BasicDistance2[2][0]; inFile >> BasicDistance2[0][1] >> BasicDistance2[1][1] >> BasicDistance2[2][1]; inFile >> BasicDistance2[0][2] >> BasicDistance2[1][2] >> BasicDistance2[2][2]; inFile >> easya >> easyb >> easyc; vector<BVector> fieldValues; float Bx, By, Bz; int nLines = n1*n2*n3; fieldValues.reserve(nLines); for (int iLine=0; iLine<nLines; ++iLine){ inFile >> Bx >> By >> Bz; fieldValues.push_back(BVector(Bx,By,Bz)); } // check completeness string lastEntry; inFile >> lastEntry; if (lastEntry != "complete") { cout << "ERROR during file reading: file is not complete" << endl; } #ifdef DEBUG_GRID cout << "easya " << easya << " easyb " << easyb << " easyc " << easyc << endl; #endif if (!easyb || !easyc) { throw MagGeometryError("TrapezoidalCartesianMFGrid only implemented for first coordinate"); } #ifdef DEBUG_GRID cout << "Grid reference point in grid system: " << xref << "," << yref << "," << zref << endl; cout << "steps " << stepx << "," << stepy << "," << stepz << endl; cout << "ns " << n1 << "," << n2 << "," << n3 << endl; for (int i=0; i<3; ++i) for (int j=0; j<3; ++j) { cout << "BasicDistance1[" << i << "][" << j << "] = " << BasicDistance1[i][j] << "BasicDistance2[" << i << "][" << j << "] = " << BasicDistance2[i][j] << endl; } #endif // the "not easy" coordinate is x double a = stepx * (n1 -1); double b = a + BasicDistance1[0][1] * (n2-1)*(n1-1) + BasicDistance1[0][2] * (n3-1)*(n1-1); // double h = stepy * (n2-1); double h = stepz * (n3-1); double delta = -BasicDistance2[0][1] * (n2-1) -BasicDistance2[0][2] * (n3-1); #ifdef DEBUG_GRID cout << "Trapeze size (a,b,h) = " << a << "," << b << "," << h << endl; #endif GlobalPoint grefp( GlobalPoint::Cylindrical( xref, Geom::pi() - yref, zref)); LocalPoint lrefp = frame().toLocal( grefp); #ifdef DEBUG_GRID cout << "Global origin " << grefp << endl; cout << "Local origin " << lrefp << endl; #endif double baMinus1 = BasicDistance1[0][2]*(n3-1) / stepx; if (std::abs(baMinus1) > 0.000001) { double b_over_a = 1 + baMinus1; double a1 = std::abs(baMinus1) > 0.000001 ? delta / baMinus1 : a/2; #ifdef DEBUG_GRID cout << "a1 = " << a1 << endl; #endif // transform reference point to grid frame double x0 = lrefp.perp() + a1; double y0 = lrefp.z() + h/2.; mapping_ = Trapezoid2RectangleMappingX( x0, y0, b_over_a, h); } else { // parallelogram mapping_ = Trapezoid2RectangleMappingX( 0, 0, delta/h); } double xrec, yrec; mapping_.rectangle( lrefp.perp(), lrefp.z(), xrec, yrec); Grid1D gridX( xrec, xrec + (a+b)/2., n1); Grid1D gridY( yref, yref + stepy*(n2-1), n2); Grid1D gridZ( yrec, yrec + h, n3); grid_ = GridType( gridX, gridY, gridZ, fieldValues); // Activate/deactivate timers // static SimpleConfigurable<bool> timerOn(false,"MFGrid:timing"); // (*TimingReport::current()).switchOn("MagneticFieldProvider::valueInTesla(TrapezoidalCylindricalMFGrid)",timerOn); }
| void TrapezoidalCylindricalMFGrid::dump | ( | void | ) | const [virtual] |
| MFGrid::LocalPoint TrapezoidalCylindricalMFGrid::fromGridFrame | ( | double | a, |
| double | b, | ||
| double | c | ||
| ) | const [virtual] |
find grid coordinates for point. For debugging and validation only.
Implements MFGrid.
Definition at line 157 of file TrapezoidalCylindricalMFGrid.cc.
References mapping_, and Trapezoid2RectangleMappingX::trapezoid().
{
double rtrap, ztrap;
mapping_.trapezoid( a, c, rtrap, ztrap);
// FIXME: "OLD" convention of phi.
// return LocalPoint(LocalPoint::Cylindrical(rtrap, Geom::pi() - b, ztrap));
return LocalPoint(LocalPoint::Cylindrical(rtrap, b, ztrap));
}
| void TrapezoidalCylindricalMFGrid::toGridFrame | ( | const LocalPoint & | p, |
| double & | a, | ||
| double & | b, | ||
| double & | c | ||
| ) | const [virtual] |
find grid coordinates for point. For debugging and validation only.
Implements MFGrid.
Definition at line 147 of file TrapezoidalCylindricalMFGrid.cc.
References a, trackerHits::c, mapping_, and Trapezoid2RectangleMappingX::rectangle().
Referenced by uncheckedValueInTesla().
| MFGrid::LocalVector TrapezoidalCylindricalMFGrid::uncheckedValueInTesla | ( | const LocalPoint & | p | ) | const [virtual] |
Interpolated field value at given point; does not check for exceptions.
Implements MFGrid3D.
Definition at line 135 of file TrapezoidalCylindricalMFGrid.cc.
References a, b, trackerHits::c, MFGrid::frame(), MFGrid3D::grid_, LinearGridInterpolator3D::interpolate(), toGridFrame(), and GloballyPositioned< T >::toLocal().
{
// static TimingReport::Item & timer= (*TimingReport::current())["MagneticFieldProvider::valueInTesla(TrapezoidalCylindricalMFGrid)"];
// TimeMe t(timer,false);
LinearGridInterpolator3D interpol( grid_);
double a, b, c;
toGridFrame( p, a, b, c);
GlobalVector gv( interpol.interpolate( a, b, c)); // grid in global frame
return frame().toLocal(gv); // must return a local vector
}
Definition at line 25 of file TrapezoidalCylindricalMFGrid.h.
Referenced by fromGridFrame(), toGridFrame(), and TrapezoidalCylindricalMFGrid().
 1.7.3
1.7.3