

|
|
|
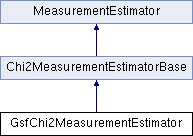
#include <GsfChi2MeasurementEstimator.h>
Public Member Functions | |
| virtual GsfChi2MeasurementEstimator * | clone () const |
| virtual std::pair< bool, double > | estimate (const TrajectoryStateOnSurface &, const TrackingRecHit &) const |
| GsfChi2MeasurementEstimator () | |
| GsfChi2MeasurementEstimator (double aMaxChi2) | |
 Public Member Functions inherited from Chi2MeasurementEstimatorBase Public Member Functions inherited from Chi2MeasurementEstimatorBase | |
| Chi2MeasurementEstimatorBase (double maxChi2, double nSigma=3., float maxDisp=std::numeric_limits< float >::max()) | |
| template<typename... Args> | |
| Chi2MeasurementEstimatorBase (double maxChi2, double nSigma, float maxDisp, Args &&...args) | |
| double | chiSquaredCut () const |
| virtual bool | estimate (const TrajectoryStateOnSurface &ts, const Plane &plane) const final |
| virtual Local2DVector | maximalLocalDisplacement (const TrajectoryStateOnSurface &ts, const Plane &plane) const final |
| double | nSigmaCut () const |
| Public Member Functions inherited from MeasurementEstimator | |
| float | maxSagitta () const |
| MeasurementEstimator () | |
| MeasurementEstimator (float maxSag, float minToll, float mpt) | |
| float | minPt2ForHitRecoveryInGluedDet () const |
| float | minTolerance2 () const |
| virtual bool | preFilter (const TrajectoryStateOnSurface &, OpaquePayload const &) const |
| virtual | ~MeasurementEstimator () |
Private Attributes | |
| Chi2MeasurementEstimator | theEstimator |
Additional Inherited Members | |
| Public Types inherited from MeasurementEstimator | |
| using | HitReturnType = std::pair< bool, double > |
| using | Local2DVector = Vector2DBase< float, LocalTag > |
| using | SurfaceReturnType = bool |
| Protected Member Functions inherited from Chi2MeasurementEstimatorBase | |
| std::pair< bool, double > | returnIt (double est) const |
Class which calculates the chisquare of a predicted Gaussian mixture trajectory state with respect to a reconstructed hit according to the Gaussian-sum filter (GSF) strategy. The relevant formulas can be found in R. Fruhwirth, Computer Physics Communications 100 (1997), 1.
Definition at line 15 of file GsfChi2MeasurementEstimator.h.
|
inline |
Definition at line 18 of file GsfChi2MeasurementEstimator.h.
Referenced by clone().
|
inline |
Definition at line 22 of file GsfChi2MeasurementEstimator.h.
|
inlinevirtual |
Implements MeasurementEstimator.
Definition at line 29 of file GsfChi2MeasurementEstimator.h.
References GsfChi2MeasurementEstimator().
|
virtual |
Returns pair( true, value) if the TrajectoryStateOnSurface is compatible with the RecHit, and pair( false, value) if it is not compatible. The TrajectoryStateOnSurface must be on the same Surface as the RecHit. For an estimator where there is no value computed, e.g. fixed window estimator, only the first(bool) part is of interest.
Implements Chi2MeasurementEstimatorBase.
Definition at line 9 of file GsfChi2MeasurementEstimator.cc.
References beam_dqm_sourceclient-live_cfg::chi2, Chi2MeasurementEstimator::estimate(), i, Chi2MeasurementEstimatorBase::returnIt(), theEstimator, PosteriorWeightsCalculator::weights(), and create_public_pileup_plots::weights.
|
private |
Definition at line 34 of file GsfChi2MeasurementEstimator.h.
Referenced by estimate().
 1.8.5
1.8.5

