

|
|
|
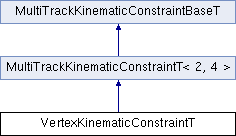
#include <VertexKinematicConstraintT.h>
Public Member Functions | |
| virtual VertexKinematicConstraintT * | clone () const |
| virtual void | init (const std::vector< KinematicState > &states, const GlobalPoint &point, const GlobalVector &mf) |
| virtual int | numberOfEquations () const |
| VertexKinematicConstraintT () | |
| virtual | ~VertexKinematicConstraintT () |
 Public Member Functions inherited from MultiTrackKinematicConstraintT< 2, 4 > Public Member Functions inherited from MultiTrackKinematicConstraintT< 2, 4 > | |
| parametersDerivativeType const & | parametersDerivative () const |
| positionDerivativeType const & | positionDerivative () const |
| valueType const & | value () const |
| virtual | ~MultiTrackKinematicConstraintT () |
| Public Member Functions inherited from MultiTrackKinematicConstraintBaseT | |
| virtual | ~MultiTrackKinematicConstraintBaseT () |
Private Types | |
| typedef MultiTrackKinematicConstraintT< 2, 4 > | super |
Private Member Functions | |
| virtual void | fillParametersDerivative () const |
| virtual void | fillPositionDerivative () const |
| virtual void | fillValue () const |
Private Attributes | |
| double | a_i [2] |
| double | delta [2] |
| GlobalVector | dpos [2] |
| double | k [2] |
| double | m [2] |
| GlobalVector | mom [2] |
| double | n [2] |
| double | novera [2] |
Additional Inherited Members | |
| Public Types inherited from MultiTrackKinematicConstraintT< 2, 4 > | |
| enum | |
| typedef ROOT::Math::SMatrix < double, DIM, 7 *NTRK > | parametersDerivativeType |
| typedef ROOT::Math::SMatrix < double, DIM, 3 > | positionDerivativeType |
| typedef MultiTrackKinematicConstraintT < NTRK, DIM > | self |
| typedef ROOT::Math::SVector < double, DIM > | valueType |
| Protected Member Functions inherited from MultiTrackKinematicConstraintT< 2, 4 > | |
| parametersDerivativeType & | jac_d () const |
| double & | jac_d (size_t i, size_t j) const |
| positionDerivativeType & | jac_e () const |
| double & | jac_e (size_t i, size_t j) const |
| valueType & | vl () const |
| double & | vl (size_t i) const |
Class implementing the vertexing constraint for extended cartesian parametrization (x,y,z,p_x,p_y,p_z,m). The equations and derivatives in general follow the P.Avery's "Applied Fitting Theory-VI" CBX 98-37
Definition at line 14 of file VertexKinematicConstraintT.h.
|
private |
Definition at line 19 of file VertexKinematicConstraintT.h.
| VertexKinematicConstraintT::VertexKinematicConstraintT | ( | ) |
|
virtual |
Definition at line 8 of file VertexKinematicConstraintT.cc.
|
inlinevirtual |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 45 of file VertexKinematicConstraintT.h.
References VertexKinematicConstraintT().
|
privatevirtual |
fills a matrix of derivatives of constraint equations w.r.t. particle parameters
Implements MultiTrackKinematicConstraintT< 2, 4 >.
Definition at line 58 of file VertexKinematicConstraintT.cc.
References a_i, delta, dpos, j, MultiTrackKinematicConstraintT< 2, 4 >::jac_d(), k, m, mom, n, novera, PV3DBase< T, PVType, FrameType >::perp2(), x, PV3DBase< T, PVType, FrameType >::x(), y, PV3DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
|
privatevirtual |
fills a matrix of derivatives of constraint equations w.r.t. vertex position
Implements MultiTrackKinematicConstraintT< 2, 4 >.
Definition at line 96 of file VertexKinematicConstraintT.cc.
References a_i, dpos, j, MultiTrackKinematicConstraintT< 2, 4 >::jac_e(), k, m, mom, n, PV3DBase< T, PVType, FrameType >::perp2(), PV3DBase< T, PVType, FrameType >::x(), PV3DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
|
privatevirtual |
fills a vector of values of constraint equations at the point where the input particles are defined.
Implements MultiTrackKinematicConstraintT< 2, 4 >.
Definition at line 40 of file VertexKinematicConstraintT.cc.
References a_i, delta, dpos, j, mom, PV3DBase< T, PVType, FrameType >::perp2(), MultiTrackKinematicConstraintT< 2, 4 >::vl(), PV3DBase< T, PVType, FrameType >::x(), PV3DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
|
virtual |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 12 of file VertexKinematicConstraintT.cc.
References a_i, delta, dpos, i, j, k, m, mom, n, novera, pileupDistInMC::num, PV3DBase< T, PVType, FrameType >::perp2(), PV3DBase< T, PVType, FrameType >::x(), PV3DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
|
virtual |
Number of equations per track used for the fit
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 125 of file VertexKinematicConstraintT.cc.
|
private |
Definition at line 23 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), fillValue(), and init().
|
private |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillValue(), and init().
|
private |
Definition at line 26 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), fillValue(), and init().
|
private |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), and init().
|
private |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), and init().
|
private |
Definition at line 25 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), fillValue(), and init().
|
private |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), and init().
|
private |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), and init().
 1.8.5
1.8.5

