

|
|
|
#include <ColinearityKinematicConstraintT.h>
Public Types | |
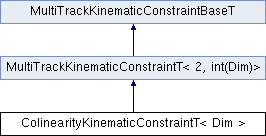
| typedef MultiTrackKinematicConstraintT < 2, int(Dim)> | super |
Public Member Functions | |
| virtual ColinearityKinematicConstraintT < Dim > * | clone () const |
| ColinearityKinematicConstraintT () | |
| void | init (const std::vector< KinematicState > &states, const GlobalPoint &ipoint, const GlobalVector &fieldValue) |
| virtual int | numberOfEquations () const |
Private Member Functions | |
| virtual void | fillParametersDerivative () const |
| virtual void | fillPositionDerivative () const |
| virtual void | fillValue () const |
Private Attributes | |
| double | a_1 |
| double | a_2 |
| AlgebraicVector7 | p1 |
| AlgebraicVector7 | p2 |
| GlobalPoint | point |
Definition at line 24 of file ColinearityKinematicConstraintT.h.
| typedef MultiTrackKinematicConstraintT<2,int(Dim)> ColinearityKinematicConstraintT< Dim >::super |
Definition at line 37 of file ColinearityKinematicConstraintT.h.
| ColinearityKinematicConstraintT< Dim >::ColinearityKinematicConstraintT | ( | ) | [inline] |
Definition at line 39 of file ColinearityKinematicConstraintT.h.
{}
| virtual ColinearityKinematicConstraintT<Dim>* ColinearityKinematicConstraintT< Dim >::clone | ( | void | ) | const [inline, virtual] |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 61 of file ColinearityKinematicConstraintT.h.
{return new ColinearityKinematicConstraintT<Dim>(*this);}
| void ColinearityKinematicConstraintT< Dim >::fillParametersDerivative | ( | ) | const [private, virtual] |
fills a matrix of derivatives of constraint equations w.r.t. particle parameters
Implements MultiTrackKinematicConstraintT< 2, int(Dim)>.
Definition at line 119 of file ColinearityKinematicConstraintT.h.
References p1, p2, colinearityKinematic::PhiTheta, point, and mathSSE::sqrt().
{
typename super::parametersDerivativeType & jac_d = super::jac_d();
double p1vx = p1(3) - a_1*(point.y() - p1(1));
double p1vy = p1(4) + a_1*(point.x() - p1(0));
double k1 = 1.0/(p1vx*p1vx + p1vy*p1vy);
double p2vx = p2(3) - a_2*(point.y() - p2(1));
double p2vy = p2(4) + a_2*(point.x() - p2(0));
double k2 = 1.0/(p2vx*p2vx + p2vy*p2vy);
// H_phi:
//x1 and x2 derivatives: 1st and 8th elements
jac_d(0,0) = -k1*a_1*p1vx;
jac_d(0,7) = k2*a_2*p2vx;
//y1 and y2 derivatives: 2nd and 9th elements:
jac_d(0,1) = -k1*a_1*p1vy;
jac_d(0,8) = k2*a_2*p2vy;
//z1 and z2 components: 3d and 10th elmnets stay 0:
jac_d(0,2) = 0.; jac_d(0,9) = 0.;
//px1 and px2 components: 4th and 11th elements:
jac_d(0,3) = -k1*p1vy;
jac_d(0,10) = k2*p2vy;
//py1 and py2 components: 5th and 12 elements:
jac_d(0,4) = k1*p1vx;
jac_d(0,11) = -k2*p2vx;
//pz1 and pz2 components: 6th and 13 elements:
jac_d(0,5) = 0.; jac_d(0,12) = 0.;
//mass components: 7th and 14th elements:
jac_d(0,6) = 0.; jac_d(0,13) = 0.;
if (Dim==colinearityKinematic::PhiTheta) {
double pt1 = sqrt(p1(3)*p1(3)+p1(4)*p1(4));
double pTot1 = p1(3)*p1(3)+p1(4)*p1(4)+p1(5)*p1(5);
double pt2 = sqrt(p2(3)*p2(3)+p2(4)*p2(4));
double pTot2 = p2(3)*p2(3)+p2(4)*p2(4)+p2(5)*p2(5);
// H_theta:
//x1 and x2 derivatives: 1st and 8th elements
jac_d(1,0) = 0.; jac_d(1,7) = 0.;
//y1 and y2 derivatives: 2nd and 9th elements:
jac_d(1,1) = 0.; jac_d(1,8) = 0.;
//z1 and z2 components: 3d and 10th elmnets stay 0:
jac_d(1,2) = 0.; jac_d(1,9) = 0.;
jac_d(1,3) = p1(3) * (p1(5)/(pTot1*pt1));
jac_d(1,10) = p2(3) * (-p2(5)/(pTot2*pt2));
//py1 and py2 components: 5th and 12 elements:
jac_d(1,4) = p1(4) * (p1(5)/(pTot1*pt1));
jac_d(1,11) = p2(4) * (-p2(5)/(pTot2*pt2));
//pz1 and pz2 components: 6th and 13 elements:
jac_d(1,5) = - pt1/pTot1;
jac_d(1,12) = pt2/pTot2;
//mass components: 7th and 14th elements:
jac_d(1,6) = 0.; jac_d(1,13) = 0.;
}
}
| void ColinearityKinematicConstraintT< Dim >::fillPositionDerivative | ( | ) | const [private, virtual] |
Returns a matrix of derivatives of constraint equations w.r.t. vertex position
Implements MultiTrackKinematicConstraintT< 2, int(Dim)>.
Definition at line 192 of file ColinearityKinematicConstraintT.h.
References p1, p2, colinearityKinematic::PhiTheta, and point.
{
typename super::positionDerivativeType & jac_e = super::jac_e();
double p1vx = p1(3) - a_1*(point.y() - p1(1));
double p1vy = p1(4) + a_1*(point.x() - p1(0));
double k1 = 1.0/(p1vx*p1vx + p1vy*p1vy);
double p2vx = p2(3) - a_2*(point.y() - p2(1));
double p2vy = p2(4) + a_2*(point.x() - p2(0));
double k2 = 1.0/(p2vx*p2vx + p2vy*p2vy);
// H_phi:
// xv component
jac_e(0,0) = k1*a_1*p1vx - k2*a_2*p2vx;
//yv component
jac_e(0,1) = k1*a_1*p1vy - k2*a_2*p2vy;
//zv component
jac_e(0,2) = 0.;
// H_theta: no correlation with vertex position
if (Dim==colinearityKinematic::PhiTheta) {
jac_e(1,0) = 0.;
jac_e(1,1) = 0.;
jac_e(1,2) = 0.;
}
}
| void ColinearityKinematicConstraintT< Dim >::fillValue | ( | ) | const [private, virtual] |
fills a vector of values of constraint equations at the point where the input particles are defined.
Implements MultiTrackKinematicConstraintT< 2, int(Dim)>.
Definition at line 93 of file ColinearityKinematicConstraintT.h.
References M_PI, p1, p2, colinearityKinematic::PhiTheta, point, and mathSSE::sqrt().
{
typename super::valueType & vl = super::vl();
double p1vx = p1(3) - a_1*(point.y() - p1(1));
double p1vy = p1(4) + a_1*(point.x() - p1(0));
double p2vx = p2(3) - a_2*(point.y() - p2(1));
double p2vy = p2(4) + a_2*(point.x() - p2(0));
// H_phi:
vl(0) = atan2(p1vy,p1vx) - atan2(p2vy,p2vx);
if ( vl(0) > M_PI ) vl(0) -= 2.0*M_PI;
if ( vl(0) <= -M_PI ) vl(0) += 2.0*M_PI;
// H_theta:
if (Dim==colinearityKinematic::PhiTheta) {
double pt1 = sqrt(p1(3)*p1(3)+p1(4)*p1(4));
double pt2 = sqrt(p2(3)*p2(3)+p2(4)*p2(4));
vl(1) = atan2(pt1,p1(5)) - atan2(pt2,p2(5));
if ( vl(1) > M_PI ) vl(1) -= 2.0*M_PI;
if ( vl(1) <= -M_PI ) vl(1) += 2.0*M_PI;
}
}
| void ColinearityKinematicConstraintT< Dim >::init | ( | const std::vector< KinematicState > & | states, |
| const GlobalPoint & | ipoint, | ||
| const GlobalVector & | fieldValue | ||
| ) | [inline, virtual] |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 43 of file ColinearityKinematicConstraintT.h.
References ColinearityKinematicConstraintT< Dim >::a_1, ColinearityKinematicConstraintT< Dim >::a_2, plotBeamSpotDB::ipoint, ColinearityKinematicConstraintT< Dim >::p1, ColinearityKinematicConstraintT< Dim >::p2, ColinearityKinematicConstraintT< Dim >::point, and PV3DBase< T, PVType, FrameType >::z().
{
if(states.size()!=2) throw VertexException("ColinearityKinematicConstraint::<2 states passed");
point = ipoint;
a_1 = -states[0].particleCharge()*fieldValue.z();
a_2 = -states[1].particleCharge()*fieldValue.z();
p1 = states[0].kinematicParameters().vector();
p2 = states[1].kinematicParameters().vector();
}
| virtual int ColinearityKinematicConstraintT< Dim >::numberOfEquations | ( | ) | const [inline, virtual] |
Number of equations per track used for the fit
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 59 of file ColinearityKinematicConstraintT.h.
References colinearityKinematic::Phi.
{return Dim == colinearityKinematic::Phi ? 1 :2;}
double ColinearityKinematicConstraintT< Dim >::a_1 [private] |
Definition at line 27 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
double ColinearityKinematicConstraintT< Dim >::a_2 [private] |
Definition at line 28 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
AlgebraicVector7 ColinearityKinematicConstraintT< Dim >::p1 [private] |
Definition at line 30 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
AlgebraicVector7 ColinearityKinematicConstraintT< Dim >::p2 [private] |
Definition at line 31 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
GlobalPoint ColinearityKinematicConstraintT< Dim >::point [private] |
Definition at line 33 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
 1.7.3
1.7.3