

|
|
|
#include <VertexKinematicConstraintT.h>
Public Member Functions | |
| virtual VertexKinematicConstraintT * | clone () const |
| virtual void | init (const std::vector< KinematicState > &states, const GlobalPoint &point, const GlobalVector &mf) |
| virtual int | numberOfEquations () const |
| VertexKinematicConstraintT () | |
| virtual | ~VertexKinematicConstraintT () |
Private Types | |
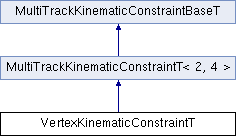
| typedef MultiTrackKinematicConstraintT< 2, 4 > | super |
Private Member Functions | |
| virtual void | fillParametersDerivative () const |
| virtual void | fillPositionDerivative () const |
| virtual void | fillValue () const |
Private Attributes | |
| double | a_i [2] |
| double | delta [2] |
| GlobalVector | dpos [2] |
| double | k [2] |
| double | m [2] |
| GlobalVector | mom [2] |
| double | n [2] |
| double | novera [2] |
Class implementing the vertexing constraint for extended cartesian parametrization (x,y,z,p_x,p_y,p_z,m). The equations and derivatives in general follow the P.Avery's "Applied Fitting Theory-VI" CBX 98-37
Definition at line 14 of file VertexKinematicConstraintT.h.
typedef MultiTrackKinematicConstraintT<2,4> VertexKinematicConstraintT::super [private] |
Definition at line 19 of file VertexKinematicConstraintT.h.
| VertexKinematicConstraintT::VertexKinematicConstraintT | ( | ) |
| VertexKinematicConstraintT::~VertexKinematicConstraintT | ( | ) | [virtual] |
Definition at line 8 of file VertexKinematicConstraintT.cc.
{}
| virtual VertexKinematicConstraintT* VertexKinematicConstraintT::clone | ( | void | ) | const [inline, virtual] |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 45 of file VertexKinematicConstraintT.h.
References VertexKinematicConstraintT().
{return new VertexKinematicConstraintT(*this);}
| void VertexKinematicConstraintT::fillParametersDerivative | ( | ) | const [private, virtual] |
fills a matrix of derivatives of constraint equations w.r.t. particle parameters
Implements MultiTrackKinematicConstraintT< 2, 4 >.
Definition at line 58 of file VertexKinematicConstraintT.cc.
References a_i, delta, dpos, j, MultiTrackKinematicConstraintT< 2, 4 >::jac_d(), k, m, mom, n, novera, PV3DBase< T, PVType, FrameType >::perp2(), PV3DBase< T, PVType, FrameType >::x(), x, PV3DBase< T, PVType, FrameType >::y(), detailsBasic3DVector::y, and PV3DBase< T, PVType, FrameType >::z().
{
ROOT::Math::SMatrix<double,2,7> el_part_d;
for(int j = 0; j!=2; ++j) {
if(a_i[j] !=0) {
//charged particle
//D Jacobian matrix
el_part_d(0,0) = mom[j].y() + a_i[j]*dpos[j].x();
el_part_d(0,1) = -mom[j].x() + a_i[j]*dpos[j].y();
el_part_d(1,0) = -k[j]*(m[j]*mom[j].x() - n[j]*mom[j].y());
el_part_d(1,1) = -k[j]*(m[j]*mom[j].y() + n[j]*mom[j].x());
el_part_d(1,2) = -1.;
el_part_d(0,3) = dpos[j].y();
el_part_d(0,4) = -dpos[j].x();
el_part_d(1,3) = k[j]*(m[j]*dpos[j].x() - novera[j]*(2*mom[j].x() - a_i[j]*dpos[j].y()));
el_part_d(1,4) = k[j]*(m[j]*dpos[j].y() - novera[j]*(2*mom[j].y() + a_i[j]*dpos[j].x()));
el_part_d(1,5) = -delta[j] /a_i[j];
super::jac_d().Place_at(el_part_d,j*2, j*7);
}else{
//neutral particle
double pt2Inverse = 1./mom[j].perp2();
el_part_d(0,0) = mom[j].y();
el_part_d(0,1) = -mom[j].x();
el_part_d(1,0) = mom[j].x() * (mom[j].z()*pt2Inverse);
el_part_d(1,1) = mom[j].y() * (mom[j].z()*pt2Inverse);
el_part_d(1,2) = -1.;
el_part_d(0,3) = dpos[j].y();
el_part_d(0,4) = -dpos[j].x();
el_part_d(1,3) = 2*(dpos[j].x()*mom[j].x()+dpos[j].y()*mom[j].y())*pt2Inverse*mom[j].x()*(mom[j].z()*pt2Inverse) - dpos[j].x()*(mom[j].z()*pt2Inverse);
el_part_d(1,4) = 2*(dpos[j].x()*mom[j].x()+dpos[j].y()*mom[j].y())*pt2Inverse*mom[j].y()*(mom[j].z()*pt2Inverse) - dpos[j].x()*(mom[j].z()*pt2Inverse);
el_part_d(1,5) = - (dpos[j].x()*mom[j].x()+dpos[j].y()*mom[j].y())*pt2Inverse;
super::jac_d().Place_at(el_part_d,j*2, j*7);
}
}
}
| void VertexKinematicConstraintT::fillPositionDerivative | ( | ) | const [private, virtual] |
fills a matrix of derivatives of constraint equations w.r.t. vertex position
Implements MultiTrackKinematicConstraintT< 2, 4 >.
Definition at line 96 of file VertexKinematicConstraintT.cc.
References a_i, dpos, j, MultiTrackKinematicConstraintT< 2, 4 >::jac_e(), k, m, mom, n, PV3DBase< T, PVType, FrameType >::perp2(), PV3DBase< T, PVType, FrameType >::x(), PV3DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
{
ROOT::Math::SMatrix<double,2,3> el_part_e;
for(int j = 0; j!=2; ++j) {
if(a_i[j] !=0) {
//charged particle
//E jacobian matrix
el_part_e(0,0) = -(mom[j].y() + a_i[j]*dpos[j].x());
el_part_e(0,1) = mom[j].x() - a_i[j]*dpos[j].y();
el_part_e(1,0) = k[j]*(m[j]*mom[j].x() - n[j]*mom[j].y());
el_part_e(1,1) = k[j]*(m[j]*mom[j].y() + n[j]*mom[j].x());
el_part_e(1,2) = 1;
super::jac_e().Place_at(el_part_e,2*j,0);
}else{
//neutral particle
double pt2Inverse = 1./mom[j].perp2();
el_part_e(0,0) = - mom[j].y();
el_part_e(0,1) = mom[j].x();
el_part_e(1,0) = -mom[j].x()*mom[j].z()*pt2Inverse;
el_part_e(1,1) = -mom[j].y()*mom[j].z()*pt2Inverse;
el_part_e(1,2) = 1;
super::jac_e().Place_at(el_part_e,2*j,0);
}
}
}
| void VertexKinematicConstraintT::fillValue | ( | ) | const [private, virtual] |
fills a vector of values of constraint equations at the point where the input particles are defined.
Implements MultiTrackKinematicConstraintT< 2, 4 >.
Definition at line 40 of file VertexKinematicConstraintT.cc.
References a_i, delta, dpos, j, mom, PV3DBase< T, PVType, FrameType >::perp2(), MultiTrackKinematicConstraintT< 2, 4 >::vl(), PV3DBase< T, PVType, FrameType >::x(), PV3DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
{
//it is 2 equations per track
for(int j = 0; j!=2; ++j) {
if(a_i[j] !=0) {
//vector of values
super::vl(j*2) = dpos[j].y()*mom[j].x() - dpos[j].x()*mom[j].y() -a_i[j]*(dpos[j].x()*dpos[j].x() + dpos[j].y()*dpos[j].y())*0.5;
super::vl(j*2 +1) = dpos[j].z() - mom[j].z()*delta[j]/a_i[j];
}else{
//neutral particle
double pt2Inverse = 1./mom[j].perp2();
super::vl(j*2) = dpos[j].y()*mom[j].x() - dpos[j].x()*mom[j].y();
super::vl(j*2 +1) = dpos[j].z() - mom[j].z()*(dpos[j].x() * mom[j].x() + dpos[j].y() * mom[j].y())*pt2Inverse;
}
}
}
| void VertexKinematicConstraintT::init | ( | const std::vector< KinematicState > & | states, |
| const GlobalPoint & | point, | ||
| const GlobalVector & | mf | ||
| ) | [virtual] |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 12 of file VertexKinematicConstraintT.cc.
References a_i, delta, dpos, i, j, k, m, mom, n, novera, PV3DBase< T, PVType, FrameType >::perp2(), PV3DBase< T, PVType, FrameType >::x(), PV3DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
{
int num = states.size();
if(num!=2) throw VertexException("VertexKinematicConstraintT !=2 states passed");
double mfz = fieldValue.z();
int j=0;
for(std::vector<KinematicState>::const_iterator i = states.begin(); i != states.end(); i++)
{
mom[j] = i->globalMomentum();
dpos[j] = ipoint - i->globalPosition();
a_i[j] = - i->particleCharge() * mfz;
double pvx = mom[j].x() - a_i[j]*dpos[j].y();
double pvy = mom[j].y() + a_i[j]*dpos[j].x();
double pvt2 = pvx*pvx+pvy*pvy;
novera[j] = (dpos[j].x() * mom[j].x() + dpos[j].y()*mom[j].y());
n[j] = a_i[j]*novera[j];
m[j] = (pvx*mom[j].x() + pvy*mom[j].y());
k[j] = -mom[j].z()/(mom[j].perp2()*pvt2);
delta[j] = std::atan2(n[j],m[j]);
++j;
}
}
| int VertexKinematicConstraintT::numberOfEquations | ( | ) | const [virtual] |
Number of equations per track used for the fit
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 125 of file VertexKinematicConstraintT.cc.
{return 2;}
double VertexKinematicConstraintT::a_i[2] [private] |
Definition at line 23 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), fillValue(), and init().
double VertexKinematicConstraintT::delta[2] [private] |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillValue(), and init().
GlobalVector VertexKinematicConstraintT::dpos[2] [private] |
Definition at line 26 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), fillValue(), and init().
double VertexKinematicConstraintT::k[2] [private] |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), and init().
double VertexKinematicConstraintT::m[2] [private] |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), and init().
GlobalVector VertexKinematicConstraintT::mom[2] [private] |
Definition at line 25 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), fillValue(), and init().
double VertexKinematicConstraintT::n[2] [private] |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), fillPositionDerivative(), and init().
double VertexKinematicConstraintT::novera[2] [private] |
Definition at line 24 of file VertexKinematicConstraintT.h.
Referenced by fillParametersDerivative(), and init().
 1.7.3
1.7.3