

|
|
|
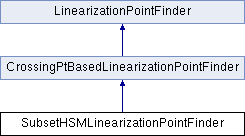
#include <SubsetHSMLinearizationPointFinder.h>
Public Member Functions | |
| virtual SubsetHSMLinearizationPointFinder * | clone () const |
| SubsetHSMLinearizationPointFinder (const signed int n_pairs=10) | |
| SubsetHSMLinearizationPointFinder (const RecTracksDistanceMatrix *m, const signed int n_pairs=-1) | |
A linearization point finder. It works the following way: 1. Calculate in an optimal way 'n_pairs' different crossing points. Optimal in this context means the following: a. Try to use as many different tracks as possible; avoid using the same track all the time. b. Use the most energetic tracks. c. Try not to group the most energetic tracks together. Try to group more energetic tracks with less energetic tracks. We assume collimated bundles here, so this is why. d. Perform optimally. Do not sort more tracks (by total energy, see b) than necessary. e. If n_pairs >= (number of all possible combinations), do not leave any combinations out. ( a. and e. are almost but not entirely fulfilled in the current impl ) 2. Do a SubsetHSM on the n points.
Definition at line 23 of file SubsetHSMLinearizationPointFinder.h.
| SubsetHSMLinearizationPointFinder::SubsetHSMLinearizationPointFinder | ( | const signed int | n_pairs = 10 | ) |
Definition at line 4 of file SubsetHSMLinearizationPointFinder.cc.
Referenced by clone().
: CrossingPtBasedLinearizationPointFinder ( SubsetHsmModeFinder3d(), n_pairs ) { }
| SubsetHSMLinearizationPointFinder::SubsetHSMLinearizationPointFinder | ( | const RecTracksDistanceMatrix * | m, |
| const signed int | n_pairs = -1 |
||
| ) |
Definition at line 9 of file SubsetHSMLinearizationPointFinder.cc.
: CrossingPtBasedLinearizationPointFinder ( m , SubsetHsmModeFinder3d(), n_pairs ) { }
| SubsetHSMLinearizationPointFinder * SubsetHSMLinearizationPointFinder::clone | ( | ) | const [virtual] |
Clone method
Reimplemented from CrossingPtBasedLinearizationPointFinder.
Definition at line 14 of file SubsetHSMLinearizationPointFinder.cc.
References SubsetHSMLinearizationPointFinder().
{
return new SubsetHSMLinearizationPointFinder ( * this );
}
 1.7.3
1.7.3