

|
|
|
#include <MuDetRod.h>
Public Member Functions | |
| virtual std::pair< bool, TrajectoryStateOnSurface > | compatible (const TrajectoryStateOnSurface &ts, const Propagator &prop, const MeasurementEstimator &est) const |
| virtual std::vector< DetWithState > | compatibleDets (const TrajectoryStateOnSurface &startingState, const Propagator &prop, const MeasurementEstimator &est) const |
| virtual const std::vector < const GeometricSearchDet * > & | components () const |
| Returns basic components, if any. | |
| virtual std::vector< DetGroup > | groupedCompatibleDets (const TrajectoryStateOnSurface &startingState, const Propagator &prop, const MeasurementEstimator &est) const |
| virtual bool | hasGroups () const |
| MuDetRod (const std::vector< const GeomDet * > &dets) | |
| Construct from a std::vector of GeomDet*. | |
| MuDetRod (std::vector< const GeomDet * >::const_iterator first, std::vector< const GeomDet * >::const_iterator last) | |
| Construct from iterators on GeomDet*. | |
| virtual | ~MuDetRod () |
| Destructor. | |
Private Types | |
| typedef GenericBinFinderInZ < float, GeomDet > | BinFinderType |
Private Member Functions | |
| void | init () |
Private Attributes | |
| BinFinderType | theBinFinder |
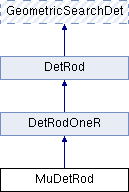
A rod of aligned equal-sized non-overlapping detectors. Designed for barrel muon DT/RPC chambers.
Definition at line 19 of file MuDetRod.h.
typedef GenericBinFinderInZ<float, GeomDet> MuDetRod::BinFinderType [private] |
Definition at line 56 of file MuDetRod.h.
| MuDetRod::MuDetRod | ( | std::vector< const GeomDet * >::const_iterator | first, |
| std::vector< const GeomDet * >::const_iterator | last | ||
| ) |
Construct from iterators on GeomDet*.
| MuDetRod::MuDetRod | ( | const std::vector< const GeomDet * > & | dets | ) |
Construct from a std::vector of GeomDet*.
| MuDetRod::~MuDetRod | ( | ) | [virtual] |
| pair< bool, TrajectoryStateOnSurface > MuDetRod::compatible | ( | const TrajectoryStateOnSurface & | ts, |
| const Propagator & | , | ||
| const MeasurementEstimator & | |||
| ) | const [virtual] |
tests the geometrical compatibility of the Det with the predicted state. The FreeTrajectoryState argument is propagated to the Det surface using the Propagator argument. The resulting TrajectoryStateOnSurface is tested for compatibility with the surface bounds. If compatible, a std::pair< true, propagatedState> is returned. If the propagation fails, or if the state is not compatible, a std::pair< false, propagatedState> is returned.
Implements GeometricSearchDet.
Definition at line 48 of file MuDetRod.cc.
References MeasurementEstimator::estimate(), TrajectoryStateOnSurface::isValid(), Propagator::propagate(), and DetRod::specificSurface().
Referenced by compatibleDets().
{
TrajectoryStateOnSurface ms = prop.propagate(ts,specificSurface());
if (ms.isValid()) return make_pair(est.estimate(ms, specificSurface()) != 0, ms);
else return make_pair(false, ms);
}
| vector< GeometricSearchDet::DetWithState > MuDetRod::compatibleDets | ( | const TrajectoryStateOnSurface & | startingState, |
| const Propagator & | prop, | ||
| const MeasurementEstimator & | est | ||
| ) | const [virtual] |
Returns all Dets compatible with a trajectory state according to the estimator est. The startingState should be propagated to the surface of each compatible Det using the Propagator passed as an argument. The default implementation should be overridden in dets with specific surface types to avoid propagation to a generic Surface
Reimplemented from GeometricSearchDet.
Definition at line 58 of file MuDetRod.cc.
References DetRodOneR::add(), DetRodOneR::basicComponents(), GenericBinFinderInZ< T, G >::binIndex(), BoundSurface::bounds(), compatible(), TrajectoryStateOnSurface::globalPosition(), Bounds::length(), LogTrace, MeasurementEstimator::maximalLocalDisplacement(), metname, PV3DBase< T, PVType, FrameType >::perp(), PV3DBase< T, PVType, FrameType >::phi(), GloballyPositioned< T >::position(), query::result, AlCaHLTBitMon_QueryRunRegistry::string, DetRod::surface(), theBinFinder, toLocal(), PV3DBase< T, PVType, FrameType >::y(), PV2DBase< T, PVType, FrameType >::y(), and PV3DBase< T, PVType, FrameType >::z().
{
const std::string metname = "Muon|RecoMuon|RecoMuonDetLayers|MuDetRod";
LogTrace(metname) << "MuDetRod::compatibleDets, Surface at R,phi: "
<< surface().position().perp() << ","
<< surface().position().phi() << " DetRod pos.";
// FIXME << " TS at R,phi: " << startingState.position().perp() << ","
// << startingState.position().phi()
vector<DetWithState> result;
// Propagate and check that the result is within bounds
pair<bool, TrajectoryStateOnSurface> compat =
compatible(startingState, prop, est);
if (!compat.first) {
LogTrace(metname) << " MuDetRod::compatibleDets: not compatible"
<< " (should not have been selected!)";
return result;
}
// Find the most probable destination component
TrajectoryStateOnSurface& tsos = compat.second;
GlobalPoint startPos = tsos.globalPosition();
int closest = theBinFinder.binIndex(startPos.z());
const vector<const GeomDet*> dets = basicComponents();
LogTrace(metname) << " MuDetRod::compatibleDets, closest det: " << closest
<< " pos: " << dets[closest]->surface().position()
<< " impact " << startPos;
// Add this detector, if it is compatible
// NOTE: add performs a null propagation
add(closest, result, tsos, prop, est);
int nclosest = result.size(); int nnextdet=0; // just DEBUG counters
// Try the neighbors on each side until no more compatible.
// If closest is not compatible the next cannot be either
if (!result.empty()) {
const BoundPlane& closestPlane(dets[closest]->surface());
MeasurementEstimator::Local2DVector maxDistance =
est.maximalLocalDisplacement( result.front().second, closestPlane);
// detHalfLen is assumed to be the same for all detectors.
float detHalfLen = closestPlane.bounds().length()/2.;
for (unsigned int idet=closest+1; idet < dets.size(); idet++) {
LocalPoint nextPos(dets[idet]->toLocal(startPos));
if (fabs(nextPos.y()) < detHalfLen + maxDistance.y()) {
LogTrace(metname) << " negativeZ: det:" << idet
<< " pos " << nextPos.y()
<< " maxDistance " << maxDistance.y();
nnextdet++;
if ( !add(idet, result, tsos, prop, est)) break;
} else {
break;
}
}
for (int idet=closest-1; idet >= 0; idet--) {
LocalPoint nextPos( dets[idet]->toLocal(startPos));
if (fabs(nextPos.y()) < detHalfLen + maxDistance.y()) {
LogTrace(metname) << " positiveZ: det:" << idet
<< " pos " << nextPos.y()
<< " maxDistance " << maxDistance.y();
nnextdet++;
if ( !add(idet, result, tsos, prop, est)) break;
} else {
break;
}
}
}
LogTrace(metname) << " MuDetRod::compatibleDets, size: " << result.size()
<< " on closest: " << nclosest
<< " # checked dets: " << nnextdet+1;
if (result.size()==0) {
LogTrace(metname) << " ***Rod not compatible---should have been discarded before!!!";
}
return result;
}
| const vector< const GeometricSearchDet * > & MuDetRod::components | ( | ) | const [virtual] |
Returns basic components, if any.
Returns direct components, if any
Implements GeometricSearchDet.
Definition at line 39 of file MuDetRod.cc.
References gather_cfg::cout, and query::result.
{
// FIXME dummy impl.
cout << "temporary dummy implementation of MuDetRod::components()!!" << endl;
static vector<const GeometricSearchDet*> result;
return result;
}
| vector< DetGroup > MuDetRod::groupedCompatibleDets | ( | const TrajectoryStateOnSurface & | startingState, |
| const Propagator & | prop, | ||
| const MeasurementEstimator & | est | ||
| ) | const [virtual] |
Similar to compatibleDets(), but the compatible Dets are grouped in one or more groups. Dets are put in the same group if they are mutually exclusive for track crossing, i.e. a reconstructible track cannot cross more than one Det from a group. Pathological tracks (spirals etc.) can of course violate this rule.
The DetGroups are sorted in the sequence of crossing by a track. In order to define the direction of crossing the Propagator used in this method should have a defined direction() : either "alongMomentum" or "oppositeToMomentum" but not "anyDirection".
The three signatures of this method differ by the input trajectory state arguments: the starting state can be a TrajectoryStateOnSurface or a FreeTrajectoryState, and the state on this CompositeDet may be already known or not. The last two arguments are as for the method compatibleDets().
First signature: The first argument is a TrajectoryStateOnSurface, usually not on the surface of this CompositeDet.
Reimplemented from GeometricSearchDet.
Definition at line 145 of file MuDetRod.cc.
References gather_cfg::cout, and query::result.
{
// FIXME should return only 1 group
cout << "dummy implementation of MuDetRod::groupedCompatibleDets()" << endl;
vector<DetGroup> result;
return result;
}
| virtual bool MuDetRod::hasGroups | ( | ) | const [inline, virtual] |
| void MuDetRod::init | ( | void | ) | [private] |
Definition at line 31 of file MuDetRod.cc.
References DetRodOneR::basicComponents(), begin, end, and theBinFinder.
{
theBinFinder = BinFinderType(basicComponents().begin(), basicComponents().end());
}
BinFinderType MuDetRod::theBinFinder [private] |
Definition at line 57 of file MuDetRod.h.
Referenced by compatibleDets(), and init().
 1.7.3
1.7.3