

|
|
|
#include <CaloDetIdAssociator.h>
Public Member Functions | |
| CaloDetIdAssociator () | |
| CaloDetIdAssociator (const int nPhi, const int nEta, const double etaBinSize) | |
| CaloDetIdAssociator (const edm::ParameterSet &pSet) | |
| virtual const GeomDet * | getGeomDet (const DetId &id) const |
| virtual const char * | name () const |
| virtual void | setGeometry (const CaloGeometry *ptr) |
| virtual void | setGeometry (const DetIdAssociatorRecord &iRecord) |
 Public Member Functions inherited from DetIdAssociator Public Member Functions inherited from DetIdAssociator | |
| virtual void | buildMap () |
| make the look-up map More... | |
| DetIdAssociator (const int nPhi, const int nEta, const double etaBinSize) | |
| double | etaBinSize () const |
| look-up map bin size in eta dimension More... | |
| virtual std::vector< DetId > | getCrossedDetIds (const std::set< DetId > &, const std::vector< GlobalPoint > &trajectory) const |
| virtual std::vector< DetId > | getCrossedDetIds (const std::set< DetId > &, const std::vector< SteppingHelixStateInfo > &trajectory, const double toleranceInSigmas=-1) const |
| virtual std::set< DetId > | getDetIdsCloseToAPoint (const GlobalPoint &, const int iN=0) const |
| virtual std::set< DetId > | getDetIdsCloseToAPoint (const GlobalPoint &direction, const unsigned int iNEtaPlus, const unsigned int iNEtaMinus, const unsigned int iNPhiPlus, const unsigned int iNPhiMinus) const |
| virtual std::set< DetId > | getDetIdsCloseToAPoint (const GlobalPoint &direction, const MapRange &mapRange) const |
| virtual std::set< DetId > | getDetIdsCloseToAPoint (const GlobalPoint &point, const double d=0) const |
| virtual std::set< DetId > | getDetIdsCloseToAPoint (const GlobalPoint &point, const double dThetaPlus, const double dThetaMinus, const double dPhiPlus, const double dPhiMinus) const |
| virtual std::set< DetId > | getDetIdsInACone (const std::set< DetId > &, const std::vector< GlobalPoint > &trajectory, const double dR) const |
| virtual int | iEta (const GlobalPoint &) const |
| look-up map eta index More... | |
| virtual int | iPhi (const GlobalPoint &) const |
| look-up map phi index More... | |
| int | nEtaBins () const |
| number of bins of the look-up map in eta dimension More... | |
| int | nPhiBins () const |
| number of bins of the look-up map in phi dimension More... | |
| virtual void | setConditions (const DetIdAssociatorRecord &) |
| virtual void | setPropagator (Propagator *ptr) |
| set a specific track propagator to be used More... | |
| const FiducialVolume & | volume () const |
| get active detector volume More... | |
| virtual | ~DetIdAssociator () |
Protected Member Functions | |
| virtual void | check_setup () const |
| virtual bool | crossedElement (const GlobalPoint &, const GlobalPoint &, const DetId &id, const double tolerance=-1, const SteppingHelixStateInfo *=0) const |
| virtual std::pair < const_iterator, const_iterator > | getDetIdPoints (const DetId &id) const |
| virtual GlobalPoint | getPosition (const DetId &id) const |
| virtual const std::vector < DetId > & | getValidDetIds (unsigned int subDetectorIndex) const |
| virtual bool | insideElement (const GlobalPoint &point, const DetId &id) const |
| Protected Member Functions inherited from DetIdAssociator | |
| virtual void | dumpMapContent (int, int) const |
| virtual void | dumpMapContent (int, int, int, int) const |
| void | fillSet (std::set< DetId > &set, unsigned int iEta, unsigned int iPhi) const |
| virtual const unsigned int | getNumberOfSubdetectors () const |
| unsigned int | index (unsigned int iEta, unsigned int iPhi) const |
| virtual bool | nearElement (const GlobalPoint &point, const DetId &id, const double distance) const |
Protected Attributes | |
| std::vector< GlobalPoint > | dummy_ |
| const CaloGeometry * | geometry_ |
| Protected Attributes inherited from DetIdAssociator | |
| std::vector< DetId > | container_ |
| const double | etaBinSize_ |
| Propagator * | ivProp_ |
| std::vector< std::pair < unsigned int, unsigned int > > | lookupMap_ |
| double | maxEta_ |
| double | minTheta_ |
| const int | nEta_ |
| const int | nPhi_ |
| bool | theMapIsValid_ |
| FiducialVolume | volume_ |
Additional Inherited Members | |
| Public Types inherited from DetIdAssociator | |
| typedef std::vector < GlobalPoint > ::const_iterator | const_iterator |
| enum | PropagationTarget { Barrel, ForwardEndcap, BackwardEndcap } |
Definition at line 33 of file CaloDetIdAssociator.h.
|
inline |
Definition at line 35 of file CaloDetIdAssociator.h.
|
inline |
Definition at line 36 of file CaloDetIdAssociator.h.
|
inline |
Definition at line 39 of file CaloDetIdAssociator.h.
|
protectedvirtual |
Reimplemented from DetIdAssociator.
Definition at line 193 of file CaloDetIdAssociator.cc.
References DetIdAssociator::check_setup(), edm::hlt::Exception, and geometry_.
|
protectedvirtual |
Reimplemented from DetIdAssociator.
Definition at line 3 of file CaloDetIdAssociator.cc.
References Plane::build(), edm::hlt::Exception, getDetIdPoints(), SteppingHelixStateInfo::getStateOnSurface(), h, TrajectoryStateOnSurface::hasError(), i, TrajectoryStateOnSurface::isValid(), j, TrajectoryStateOnSurface::localError(), M_PI, mag(), max(), AlCaHLTBitMon_ParallelJobs::p, p1, p2, phi, PV3DBase< T, PVType, FrameType >::phi(), LocalTrajectoryError::positionError(), funct::pow(), dttmaxenums::r32, LocalError::rotate(), idealTransformation::rotation, LocalError::scale(), mathSSE::sqrt(), std::swap(), csvLumiCalc::unit, PV3DBase< T, PVType, FrameType >::x(), LocalError::xx(), LocalError::xy(), create_public_lumi_plots::xy, PV3DBase< T, PVType, FrameType >::y(), LocalError::yy(), and PV3DBase< T, PVType, FrameType >::z().
|
protectedvirtual |
Implements DetIdAssociator.
Definition at line 210 of file CaloDetIdAssociator.cc.
References dummy_, geometry_, CaloCellGeometry::getCorners(), CaloSubdetectorGeometry::getGeometry(), CaloGeometry::getSubdetectorGeometry(), and LogDebug.
Referenced by crossedElement().
|
protectedvirtual |
Implements DetIdAssociator.
Definition at line 199 of file CaloDetIdAssociator.cc.
References geometry_, CaloSubdetectorGeometry::getGeometry(), CaloCellGeometry::getPosition(), and CaloGeometry::getSubdetectorGeometry().
|
protectedvirtual |
Implements DetIdAssociator.
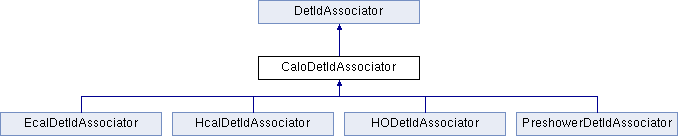
Reimplemented in EcalDetIdAssociator, HcalDetIdAssociator, HODetIdAssociator, and PreshowerDetIdAssociator.
Definition at line 203 of file CaloDetIdAssociator.cc.
References DetId::Calo, edm::hlt::Exception, geometry_, and CaloGeometry::getValidDetIds().
|
inlineprotectedvirtual |
Implements DetIdAssociator.
Definition at line 59 of file CaloDetIdAssociator.h.
References geometry_, CaloSubdetectorGeometry::getGeometry(), CaloGeometry::getSubdetectorGeometry(), and CaloCellGeometry::inside().
|
inlinevirtual |
Implements DetIdAssociator.
Reimplemented in EcalDetIdAssociator, HcalDetIdAssociator, HODetIdAssociator, and PreshowerDetIdAssociator.
Definition at line 48 of file CaloDetIdAssociator.h.
|
inlinevirtual |
Definition at line 42 of file CaloDetIdAssociator.h.
References geometry_.
Referenced by setGeometry().
|
virtual |
Implements DetIdAssociator.
Definition at line 186 of file CaloDetIdAssociator.cc.
References edm::eventsetup::DependentRecordImplementation< RecordT, ListT >::getRecord(), edm::ESHandle< class >::product(), and setGeometry().
|
protected |
Definition at line 69 of file CaloDetIdAssociator.h.
Referenced by getDetIdPoints().
|
protected |
Definition at line 68 of file CaloDetIdAssociator.h.
Referenced by check_setup(), getDetIdPoints(), getPosition(), PreshowerDetIdAssociator::getValidDetIds(), HODetIdAssociator::getValidDetIds(), HcalDetIdAssociator::getValidDetIds(), EcalDetIdAssociator::getValidDetIds(), getValidDetIds(), insideElement(), and setGeometry().
 1.8.5
1.8.5

