

|
|
|
#include <Chi2MeasurementEstimator.h>
Public Member Functions | |
| Chi2MeasurementEstimator (double maxChi2, double nSigma=3.) | |
| virtual Chi2MeasurementEstimator * | clone () const |
| template<unsigned int D> | |
| std::pair< bool, double > | estimate (const TrajectoryStateOnSurface &, const TransientTrackingRecHit &) const |
| virtual std::pair< bool, double > | estimate (const TrajectoryStateOnSurface &, const TransientTrackingRecHit &) const |
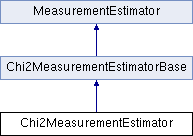
A Chi2 Measurement Estimator. Computhes the Chi^2 of a TrajectoryState with a RecHit or a BoundPlane. The TrajectoryState must have errors. Works for any RecHit dimension. Ported from ORCA.
Definition at line 17 of file Chi2MeasurementEstimator.h.
| Chi2MeasurementEstimator::Chi2MeasurementEstimator | ( | double | maxChi2, |
| double | nSigma = 3. |
||
| ) | [inline, explicit] |
Construct with cuts on chi2 and nSigma. The cut on Chi2 is used to define the acceptance of RecHits. The errors of the trajectory state are multiplied by nSigma to define acceptance of BoundPlane and maximalLocalDisplacement.
Definition at line 25 of file Chi2MeasurementEstimator.h.
Referenced by clone().
:
Chi2MeasurementEstimatorBase( maxChi2, nSigma) {}
| virtual Chi2MeasurementEstimator* Chi2MeasurementEstimator::clone | ( | void | ) | const [inline, virtual] |
Implements MeasurementEstimator.
Definition at line 33 of file Chi2MeasurementEstimator.h.
References Chi2MeasurementEstimator().
{
return new Chi2MeasurementEstimator(*this);
}
| std::pair< bool, double > Chi2MeasurementEstimator::estimate | ( | const TrajectoryStateOnSurface & | ts, |
| const TransientTrackingRecHit & | hit | ||
| ) | const [virtual] |
Returns pair( true, value) if the TrajectoryStateOnSurface is compatible with the RecHit, and pair( false, value) if it is not compatible. The TrajectoryStateOnSurface must be on the same Surface as the RecHit. For an estimator where there is no value computed, e.g. fixed window estimator, only the first(bool) part is of interest.
Implements Chi2MeasurementEstimatorBase.
Definition at line 8 of file Chi2MeasurementEstimator.cc.
References TrackingRecHit::dimension(), and Exception.
Referenced by CRackTrajectoryBuilder::AddHit(), MuonChi2MeasurementEstimator::estimate(), GsfChi2MeasurementEstimator::estimate(), Chi2SwitchingEstimator::estimate(), CosmicMuonSmoother::fit(), MuonRoadTrajectoryBuilder::GatherHits(), SimpleTrackRefitter::refitTrack(), and CosmicMuonSmoother::smooth().
{
switch (aRecHit.dimension()) {
case 1: return estimate<1>(tsos,aRecHit);
case 2: return estimate<2>(tsos,aRecHit);
case 3: return estimate<3>(tsos,aRecHit);
case 4: return estimate<4>(tsos,aRecHit);
case 5: return estimate<5>(tsos,aRecHit);
}
throw cms::Exception("RecHit of invalid size (not 1,2,3,4,5)");
}
| std::pair<bool,double> Chi2MeasurementEstimator::estimate | ( | const TrajectoryStateOnSurface & | ts, |
| const TransientTrackingRecHit & | hit | ||
| ) | const [virtual] |
Returns pair( true, value) if the TrajectoryStateOnSurface is compatible with the RecHit, and pair( false, value) if it is not compatible. The TrajectoryStateOnSurface must be on the same Surface as the RecHit. For an estimator where there is no value computed, e.g. fixed window estimator, only the first(bool) part is of interest.
Implements Chi2MeasurementEstimatorBase.
 1.7.3
1.7.3