

|
|
|
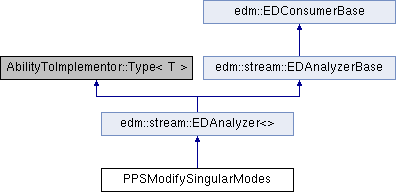
Modifies the alignment modes unconstrained by the track-based alignment. More...
Private Member Functions | |
| void | analyze (const edm::Event &e, const edm::EventSetup &es) override |
| void | beginRun (edm::Run const &, edm::EventSetup const &) override |
Private Attributes | |
| edm::ParameterSet | ps_ |
| edm::ESGetToken< CTPPSGeometry, VeryForwardRealGeometryRecord > | tokenRealGeometry_ |
Additional Inherited Members | |
 Public Types inherited from edm::stream::EDAnalyzer<> Public Types inherited from edm::stream::EDAnalyzer<> | |
| using | CacheTypes = CacheContexts< T... > |
| using | GlobalCache = typename CacheTypes::GlobalCache |
| using | HasAbility = AbilityChecker< T... > |
| using | InputProcessBlockCache = typename CacheTypes::InputProcessBlockCache |
| using | LuminosityBlockCache = typename CacheTypes::LuminosityBlockCache |
| using | LuminosityBlockContext = LuminosityBlockContextT< LuminosityBlockCache, RunCache, GlobalCache > |
| using | LuminosityBlockSummaryCache = typename CacheTypes::LuminosityBlockSummaryCache |
| using | RunCache = typename CacheTypes::RunCache |
| using | RunContext = RunContextT< RunCache, GlobalCache > |
| using | RunSummaryCache = typename CacheTypes::RunSummaryCache |
| Public Types inherited from edm::stream::EDAnalyzerBase | |
| typedef EDAnalyzerAdaptorBase | ModuleType |
| Public Types inherited from edm::EDConsumerBase | |
| typedef ProductLabels | Labels |
| Static Public Member Functions inherited from edm::stream::EDAnalyzerBase | |
| static const std::string & | baseType () |
| static void | fillDescriptions (ConfigurationDescriptions &descriptions) |
| static void | prevalidate (ConfigurationDescriptions &descriptions) |
| Protected Member Functions inherited from edm::EDConsumerBase | |
| template<typename ProductType , BranchType B = InEvent> | |
| EDGetTokenT< ProductType > | consumes (edm::InputTag const &tag) |
| template<BranchType B = InEvent> | |
| EDConsumerBaseAdaptor< B > | consumes (edm::InputTag tag) noexcept |
| EDGetToken | consumes (const TypeToGet &id, edm::InputTag const &tag) |
| template<BranchType B> | |
| EDGetToken | consumes (TypeToGet const &id, edm::InputTag const &tag) |
| ConsumesCollector | consumesCollector () |
| Use a ConsumesCollector to gather consumes information from helper functions. More... | |
| template<typename ESProduct , typename ESRecord , Transition Tr = Transition::Event> | |
| auto | esConsumes () |
| template<typename ESProduct , typename ESRecord , Transition Tr = Transition::Event> | |
| auto | esConsumes (ESInputTag const &tag) |
| template<Transition Tr = Transition::Event> | |
| constexpr auto | esConsumes () |
| template<Transition Tr = Transition::Event> | |
| auto | esConsumes (ESInputTag tag) |
| template<Transition Tr = Transition::Event> | |
| ESGetTokenGeneric | esConsumes (eventsetup::EventSetupRecordKey const &iRecord, eventsetup::DataKey const &iKey) |
| Used with EventSetupRecord::doGet. More... | |
| template<typename ProductType , BranchType B = InEvent> | |
| EDGetTokenT< ProductType > | mayConsume (edm::InputTag const &tag) |
| EDGetToken | mayConsume (const TypeToGet &id, edm::InputTag const &tag) |
| template<BranchType B> | |
| EDGetToken | mayConsume (const TypeToGet &id, edm::InputTag const &tag) |
| void | resetItemsToGetFrom (BranchType iType) |
Modifies the alignment modes unconstrained by the track-based alignment.
Definition at line 27 of file PPSModifySingularModes.cc.
| PPSModifySingularModes::PPSModifySingularModes | ( | const edm::ParameterSet & | ps | ) |
Definition at line 46 of file PPSModifySingularModes.cc.
References edm::BeginRun.
|
inlineoverrideprivatevirtual |
Implements edm::stream::EDAnalyzerBase.
Definition at line 38 of file PPSModifySingularModes.cc.
|
overrideprivatevirtual |
Reimplemented from edm::stream::EDAnalyzerBase.
Definition at line 51 of file PPSModifySingularModes.cc.
References CTPPSDetId::arm(), AlignmentTask::buildGeometry(), HltBtagPostValidation_cff::c, ztail::d, Exception, factorRPFromSensorCorrections(), edm::EventSetup::getData(), edm::ParameterSet::getUntrackedParameter(), input, makeListRunsInFiles::inputFile, CTPPSRPAlignmentCorrectionsMethods::loadFromXML(), convertSQLitetoXML_cfg::output, download_sqlite_cfg::outputFile, ps_, CTPPSDetId::rp(), CTPPSDetId::station(), tokenRealGeometry_, CTPPSRPAlignmentCorrectionsMethods::writeToXML(), z, and testProducerWithPsetDescEmpty_cfi::z2.
|
private |
Definition at line 32 of file PPSModifySingularModes.cc.
Referenced by beginRun().
|
private |
Definition at line 34 of file PPSModifySingularModes.cc.
Referenced by beginRun().
 1.8.14
1.8.14