

|
|
|
#include <BarrelDetLayer.h>
Public Member Functions | |
| BarrelDetLayer (bool doHaveGroup) | |
| std::pair< bool, TrajectoryStateOnSurface > | compatible (const TrajectoryStateOnSurface &ts, const Propagator &, const MeasurementEstimator &) const final |
| bool | contains (const Local3DPoint &p) const |
| Location | location () const final |
| DetLayer interface. More... | |
| virtual const BoundCylinder & | specificSurface () const final |
| Extension of the interface. More... | |
| const BoundSurface & | surface () const final |
| GeometricSearchDet interface. More... | |
| ~BarrelDetLayer () override | |
 Public Member Functions inherited from DetLayer Public Member Functions inherited from DetLayer | |
| DetLayer (bool doHaveGroup, bool ibar) | |
| bool | isBarrel () const |
| bool | isForward () const |
| int | seqNum () const |
| void | setSeqNum (int sq) |
| virtual SubDetector | subDetector () const =0 |
| The type of detector (PixelBarrel, PixelEndcap, TIB, TOB, TID, TEC, CSC, DT, RPCBarrel, RPCEndcap) More... | |
| ~DetLayer () override | |
| Public Member Functions inherited from GeometricSearchDet | |
| virtual const std::vector< const GeomDet * > & | basicComponents () const =0 |
| virtual std::vector< DetWithState > | compatibleDets (const TrajectoryStateOnSurface &startingState, const Propagator &prop, const MeasurementEstimator &est) const |
| virtual void | compatibleDetsV (const TrajectoryStateOnSurface &startingState, const Propagator &prop, const MeasurementEstimator &est, std::vector< DetWithState > &result) const |
| virtual const std::vector< const GeometricSearchDet * > & | components () const =0 |
| Returns basic components, if any. More... | |
| GeometricSearchDet (bool doHaveGroups) | |
| virtual std::vector< DetGroup > | groupedCompatibleDets (const TrajectoryStateOnSurface &startingState, const Propagator &prop, const MeasurementEstimator &est) const |
| virtual void | groupedCompatibleDetsV (const TrajectoryStateOnSurface &startingState, const Propagator &prop, const MeasurementEstimator &est, std::vector< DetGroup > &result) const |
| bool | hasGroups () const |
| virtual const Surface::PositionType & | position () const |
| Returns position of the surface. More... | |
| virtual | ~GeometricSearchDet () |
Protected Member Functions | |
| SimpleCylinderBounds const & | bounds () const |
| virtual BoundCylinder * | computeSurface () |
| virtual void | initialize () |
| void | setSurface (BoundCylinder *cp) |
Private Attributes | |
| ReferenceCountingPointer< BoundCylinder > | theCylinder |
Additional Inherited Members | |
| Public Types inherited from DetLayer | |
| typedef GeomDetEnumerators::Location | Location |
| typedef GeomDetEnumerators::SubDetector | SubDetector |
| Public Types inherited from GeometricSearchDet | |
| typedef std::pair< const GeomDet *, TrajectoryStateOnSurface > | DetWithState |
| typedef BoundSurface::PositionType | PositionType |
| typedef BoundSurface::RotationType | RotationType |
| typedef TrajectoryStateOnSurface | TrajectoryState |
| Protected Attributes inherited from GeometricSearchDet | |
| bool | haveGroups |
| GeomDetCompatibilityChecker | theCompatibilityChecker |
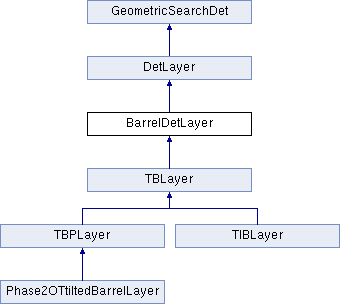
A specialization of the DetLayer interface for barrel layers. Barrel layers are cylinders with their axes parallel to the global Z axis. The methods that have a common implementation for all BarrelDetLayers are implemented in this class, but some methods are left abstract.
Definition at line 22 of file BarrelDetLayer.h.
|
inline |
Definition at line 24 of file BarrelDetLayer.h.
|
override |
Definition at line 11 of file BarrelDetLayer.cc.
|
inlineprotected |
Definition at line 49 of file BarrelDetLayer.h.
References runTheMatrix::const, and theCylinder.
|
finalvirtual |
tests the geometrical compatibility of the Det with the predicted state. The FreeTrajectoryState argument is propagated to the Det surface using the Propagator argument. The resulting TrajectoryStateOnSurface is tested for compatibility with the surface bounds. If compatible, a std::pair< true, propagatedState> is returned. If the propagation fails, or if the state is not compatible, a std::pair< false, propagatedState> is returned.
Implements GeometricSearchDet.
Definition at line 58 of file BarrelDetLayer.cc.
References funct::abs(), TrajectoryStateOnSurface::cartesianError(), GlobalErrorBase< T, ErrorWeightType >::czz(), l1tTrackerHTMiss_cfi::deltaZ, TrajectoryStateOnSurface::globalDirection(), TrajectoryStateOnSurface::globalPosition(), TrajectoryStateOnSurface::hasError(), TrajectoryStateOnSurface::isValid(), HLTSiStripMonitoring_cff::nSigma, PV3DBase< T, PVType, FrameType >::perp(), CartesianTrajectoryError::position(), Propagator::propagate(), mathSSE::sqrt(), UNLIKELY, and PV3DBase< T, PVType, FrameType >::z().
|
protectedvirtual |
Definition at line 21 of file BarrelDetLayer.cc.
References Cylinder::computeRadius(), BoundingBox::corners(), F(), SiStripPI::max, SiStripPI::min, and makeMuonMisalignmentScenario::rot.
| bool BarrelDetLayer::contains | ( | const Local3DPoint & | p | ) | const |
Definition at line 16 of file BarrelDetLayer.cc.
References AlCaHLTBitMon_ParallelJobs::p.
|
protectedvirtual |
Definition at line 18 of file BarrelDetLayer.cc.
Referenced by TBPLayer::construct(), MTDTrayBarrelLayer::MTDTrayBarrelLayer(), MuRodBarrelLayer::MuRodBarrelLayer(), Phase2OTtiltedBarrelLayer::Phase2OTtiltedBarrelLayer(), and TIBLayer::TIBLayer().
|
inlinefinalvirtual |
DetLayer interface.
Implements DetLayer.
Definition at line 36 of file BarrelDetLayer.h.
References GeomDetEnumerators::barrel.
|
protected |
Definition at line 14 of file BarrelDetLayer.cc.
References CommonMethods::cp().
|
inlinefinalvirtual |
Extension of the interface.
Definition at line 39 of file BarrelDetLayer.h.
References theCylinder.
Referenced by MuonNavigationSchool::addBarrelLayer(), GroupedCkfTrajectoryBuilder::advanceOneLayer(), CkfDebugger::analyseRecHitNotFound(), DirectMuonNavigation::checkCompatible(), DirectTrackerNavigation::checkCompatible(), MuonShowerInformationFiller::crossingPoint(), MultipleScatteringGeometry::detLayers(), HitPairGeneratorFromLayerPairForPhotonConversion::getLayerRadius(), PixelTripletNoTipGenerator::hitTriplets(), ThirdHitCorrection::init(), InnerDeltaPhi::initBarrelLayer(), InnerDeltaPhi::initBarrelMS(), ThirdHitRZPredictionBase::initLayer(), ThirdHitPrediction::initLayer(), TkLayerLess::insideOutLess(), TkLayerLess::insideOutLessSigned(), SimpleNavigationSchool::linkNextForwardLayer(), OutInConversionSeedFinder::makeEstimator(), MSLayer::MSLayer(), MuonDetLayerComp::operator()(), ExtractBarrelDetLayerR::operator()(), TIBLayer::TIBLayer(), and SimpleNavigableLayer::wellInside().
|
inlinefinalvirtual |
GeometricSearchDet interface.
Implements GeometricSearchDet.
Definition at line 29 of file BarrelDetLayer.h.
References theCylinder.
Referenced by TkLayerLess::barrelForwardLess(), PixelTripletNoTipGenerator::hitTriplets(), ThirdHitRZPredictionBase::initLayer(), ThirdHitPrediction::initLayer(), SimpleNavigationSchool::linkNextForwardLayer(), and MSLayer::MSLayer().
|
private |
Definition at line 53 of file BarrelDetLayer.h.
Referenced by bounds(), specificSurface(), and surface().
 1.8.14
1.8.14