

|
|
|
#include <ColinearityKinematicConstraintT.h>
Public Types | |
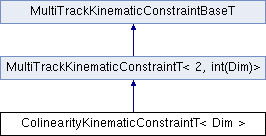
| typedef MultiTrackKinematicConstraintT< 2, int(Dim)> | super |
 Public Types inherited from MultiTrackKinematicConstraintT< 2, int(Dim)> Public Types inherited from MultiTrackKinematicConstraintT< 2, int(Dim)> | |
| enum | |
| typedef ROOT::Math::SMatrix< double, DIM, 7 *NTRK > | parametersDerivativeType |
| typedef ROOT::Math::SMatrix< double, DIM, 3 > | positionDerivativeType |
| typedef MultiTrackKinematicConstraintT< NTRK, DIM > | self |
| typedef ROOT::Math::SVector< double, DIM > | valueType |
Public Member Functions | |
| ColinearityKinematicConstraintT< Dim > * | clone () const override |
| ColinearityKinematicConstraintT () | |
| void | init (const std::vector< KinematicState > &states, const GlobalPoint &ipoint, const GlobalVector &fieldValue) override |
| int | numberOfEquations () const override |
| Public Member Functions inherited from MultiTrackKinematicConstraintT< 2, int(Dim)> | |
| parametersDerivativeType const & | parametersDerivative () const |
| positionDerivativeType const & | positionDerivative () const |
| valueType const & | value () const |
| ~MultiTrackKinematicConstraintT () override | |
| Public Member Functions inherited from MultiTrackKinematicConstraintBaseT | |
| virtual | ~MultiTrackKinematicConstraintBaseT () |
Private Member Functions | |
| void | fillParametersDerivative () const override |
| void | fillPositionDerivative () const override |
| void | fillValue () const override |
Private Attributes | |
| double | a_1 |
| double | a_2 |
| AlgebraicVector7 | p1 |
| AlgebraicVector7 | p2 |
| GlobalPoint | point |
Additional Inherited Members | |
| Protected Member Functions inherited from MultiTrackKinematicConstraintT< 2, int(Dim)> | |
| parametersDerivativeType & | jac_d () const |
| double & | jac_d (size_t i, size_t j) const |
| positionDerivativeType & | jac_e () const |
| double & | jac_e (size_t i, size_t j) const |
| valueType & | vl () const |
| double & | vl (size_t i) const |
Definition at line 23 of file ColinearityKinematicConstraintT.h.
| typedef MultiTrackKinematicConstraintT<2, int(Dim)> ColinearityKinematicConstraintT< Dim >::super |
Definition at line 34 of file ColinearityKinematicConstraintT.h.
|
inline |
Definition at line 36 of file ColinearityKinematicConstraintT.h.
|
inlineoverridevirtual |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 59 of file ColinearityKinematicConstraintT.h.
|
overrideprivatevirtual |
fills a matrix of derivatives of constraint equations w.r.t. particle parameters
Implements MultiTrackKinematicConstraintT< 2, int(Dim)>.
Definition at line 115 of file ColinearityKinematicConstraintT.h.
References p1, p2, colinearityKinematic::PhiTheta, point, HLT_FULL_cff::pt1, HLT_FULL_cff::pt2, and mathSSE::sqrt().
|
overrideprivatevirtual |
Returns a matrix of derivatives of constraint equations w.r.t. vertex position
Implements MultiTrackKinematicConstraintT< 2, int(Dim)>.
Definition at line 192 of file ColinearityKinematicConstraintT.h.
References p1, p2, colinearityKinematic::PhiTheta, and point.
|
overrideprivatevirtual |
fills a vector of values of constraint equations at the point where the input particles are defined.
Implements MultiTrackKinematicConstraintT< 2, int(Dim)>.
Definition at line 87 of file ColinearityKinematicConstraintT.h.
References M_PI, p1, p2, colinearityKinematic::PhiTheta, point, HLT_FULL_cff::pt1, HLT_FULL_cff::pt2, and mathSSE::sqrt().
|
inlineoverridevirtual |
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 39 of file ColinearityKinematicConstraintT.h.
References ColinearityKinematicConstraintT< Dim >::a_1, ColinearityKinematicConstraintT< Dim >::a_2, plotBeamSpotDB::ipoint, ColinearityKinematicConstraintT< Dim >::p1, ColinearityKinematicConstraintT< Dim >::p2, ColinearityKinematicConstraintT< Dim >::point, and PV3DBase< T, PVType, FrameType >::z().
|
inlineoverridevirtual |
Number of equations per track used for the fit
Implements MultiTrackKinematicConstraintBaseT.
Definition at line 57 of file ColinearityKinematicConstraintT.h.
References colinearityKinematic::Phi.
|
private |
Definition at line 25 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
|
private |
Definition at line 26 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
|
private |
Definition at line 28 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
|
private |
Definition at line 29 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
|
private |
Definition at line 31 of file ColinearityKinematicConstraintT.h.
Referenced by ColinearityKinematicConstraintT< Dim >::init().
 1.8.16
1.8.16