

|
|
|
#include <DTNewROS8FileReader.h>
Private Attributes | |
| edm::EventNumber_t | eventNum |
| RawFile | inputFile |
| edm::RunNumber_t | runNumber |
Static Private Attributes | |
| static const int | ros8WordLenght = 4 |
Additional Inherited Members | |
 Public Types inherited from edm::EDProducer Public Types inherited from edm::EDProducer | |
| typedef EDProducer | ModuleType |
| Public Types inherited from edm::ProducerBase | |
| using | ModuleToResolverIndicies = std::unordered_multimap< std::string, std::tuple< edm::TypeID const *, const char *, edm::ProductResolverIndex >> |
| typedef ProductRegistryHelper::TypeLabelList | TypeLabelList |
| Public Types inherited from edm::EDConsumerBase | |
| typedef ProductLabels | Labels |
| Static Public Member Functions inherited from edm::EDProducer | |
| static const std::string & | baseType () |
| static void | fillDescriptions (ConfigurationDescriptions &descriptions) |
| static void | prevalidate (ConfigurationDescriptions &descriptions) |
| static bool | wantsGlobalLuminosityBlocks () |
| static bool | wantsGlobalRuns () |
| static bool | wantsStreamLuminosityBlocks () |
| static bool | wantsStreamRuns () |
| Protected Member Functions inherited from edm::EDConsumerBase | |
| template<typename ProductType , BranchType B = InEvent> | |
| EDGetTokenT< ProductType > | consumes (edm::InputTag const &tag) |
| EDGetToken | consumes (const TypeToGet &id, edm::InputTag const &tag) |
| template<BranchType B> | |
| EDGetToken | consumes (TypeToGet const &id, edm::InputTag const &tag) |
| ConsumesCollector | consumesCollector () |
| Use a ConsumesCollector to gather consumes information from helper functions. More... | |
| template<typename ProductType , BranchType B = InEvent> | |
| void | consumesMany () |
| void | consumesMany (const TypeToGet &id) |
| template<BranchType B> | |
| void | consumesMany (const TypeToGet &id) |
| template<typename ProductType , BranchType B = InEvent> | |
| EDGetTokenT< ProductType > | mayConsume (edm::InputTag const &tag) |
| EDGetToken | mayConsume (const TypeToGet &id, edm::InputTag const &tag) |
| template<BranchType B> | |
| EDGetToken | mayConsume (const TypeToGet &id, edm::InputTag const &tag) |
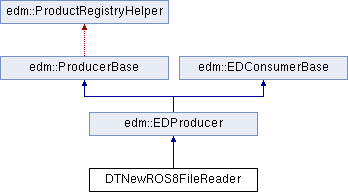
Read DT ROS8 raw data files From DTROS8FileReader
Definition at line 19 of file DTNewROS8FileReader.h.
| DTNewROS8FileReader::DTNewROS8FileReader | ( | const edm::ParameterSet & | pset | ) |
Constructor.
Definition at line 36 of file DTNewROS8FileReader.cc.
References Exception, RawFile::fail(), corrVsCorr::filename, edm::ParameterSet::getUntrackedParameter(), inputFile, and RawFile::open().
|
override |
Destructor.
Definition at line 51 of file DTNewROS8FileReader.cc.
References RawFile::close(), and inputFile.
|
virtual |
Definition at line 196 of file DTNewROS8FileReader.cc.
References RawFile::eof(), and inputFile.
Referenced by fillRawData().
|
virtual |
Generate and fill FED raw data for a full event.
Definition at line 56 of file DTNewROS8FileReader.cc.
References checkEndOfFile(), popcon2dropbox::copy(), gather_cfg::cout, FEDRawData::data(), data, TauDecayModes::dec, eventNum, FEDRawDataCollection::FEDData(), mps_fire::i, edm::EventBase::id(), inputFile, FEDNumbering::MINDTFEDID, RawFile::read(), FEDRawData::resize(), ros8WordLenght, runNumber, and mitigatedMETSequence_cff::U.
Referenced by produce().
|
overridevirtual |
Implements edm::EDProducer.
Definition at line 186 of file DTNewROS8FileReader.cc.
References fillRawData(), eostools::move(), edm::Event::put(), and matplotRender::rawdata.
|
private |
Definition at line 41 of file DTNewROS8FileReader.h.
Referenced by fillRawData().
|
private |
Definition at line 38 of file DTNewROS8FileReader.h.
Referenced by checkEndOfFile(), DTNewROS8FileReader(), fillRawData(), and ~DTNewROS8FileReader().
|
staticprivate |
Definition at line 43 of file DTNewROS8FileReader.h.
Referenced by fillRawData().
|
private |
Definition at line 40 of file DTNewROS8FileReader.h.
Referenced by fillRawData().
 1.8.11
1.8.11

