

|
|
|
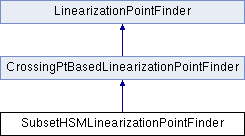
#include <SubsetHSMLinearizationPointFinder.h>
Public Member Functions | |
| SubsetHSMLinearizationPointFinder * | clone () const override |
| SubsetHSMLinearizationPointFinder (const signed int n_pairs=10) | |
| SubsetHSMLinearizationPointFinder (const RecTracksDistanceMatrix *m, const signed int n_pairs=-1) | |
 Public Member Functions inherited from CrossingPtBasedLinearizationPointFinder Public Member Functions inherited from CrossingPtBasedLinearizationPointFinder | |
| CrossingPtBasedLinearizationPointFinder (const ModeFinder3d &algo, const signed int n_pairs=5) | |
| CrossingPtBasedLinearizationPointFinder (const RecTracksDistanceMatrix *m, const ModeFinder3d &algo, const signed int n_pairs=-1) | |
| CrossingPtBasedLinearizationPointFinder (const CrossingPtBasedLinearizationPointFinder &) | |
| GlobalPoint | getLinearizationPoint (const std::vector< reco::TransientTrack > &) const override |
| GlobalPoint | getLinearizationPoint (const std::vector< FreeTrajectoryState > &) const override |
| ~CrossingPtBasedLinearizationPointFinder () override | |
| Public Member Functions inherited from LinearizationPointFinder | |
| virtual | ~LinearizationPointFinder () |
Additional Inherited Members | |
| Protected Attributes inherited from CrossingPtBasedLinearizationPointFinder | |
| const RecTracksDistanceMatrix * | theMatrix |
| signed int | theNPairs |
| const bool | useMatrix |
A linearization point finder. It works the following way:
Definition at line 23 of file SubsetHSMLinearizationPointFinder.h.
| SubsetHSMLinearizationPointFinder::SubsetHSMLinearizationPointFinder | ( | const signed int | n_pairs = 10 | ) |
Definition at line 4 of file SubsetHSMLinearizationPointFinder.cc.
Referenced by clone().
| SubsetHSMLinearizationPointFinder::SubsetHSMLinearizationPointFinder | ( | const RecTracksDistanceMatrix * | m, |
| const signed int | n_pairs = -1 |
||
| ) |
Definition at line 9 of file SubsetHSMLinearizationPointFinder.cc.
|
overridevirtual |
Clone method
Reimplemented from CrossingPtBasedLinearizationPointFinder.
Definition at line 14 of file SubsetHSMLinearizationPointFinder.cc.
References SubsetHSMLinearizationPointFinder().
 1.8.11
1.8.11

